Kinematic Parameter Optimization
|
Choosing optimal parameters (i.e. number of links, link lengths, mounting positions etc.) that allow traditional or compliant robots to move and perform useful tasks efficiently is currently an open area of research. A challenging and important part of this endeavor is defining appropriate metrics used in the optimization routine to distinguish between good and poor designs. A good performance metric captures and quantifies a particular characteristic of the robot without being too laborious or expensive to calculate, and can guide an automatic optimization to find useful designs. Developing these metrics relies on kinematic and kino-dynamic models of robots.
Once a set of appropriate metrics has been been defined, we can employ various optimization strategies, such as genetic evolutionary algorithms, to search through many robotic designs and identify the robots that are optimally suited to perform the tasks we care about. Using multi-objective optimization techniques allows the design, combined with parallel computing, we can generate many different optimal designs and investigate the trade-offs between the metrics we have defined. 
The Pneubotics continuum joint is a versatile 2-DOF joint used to validate the design of various soft robot design and control strategies. |
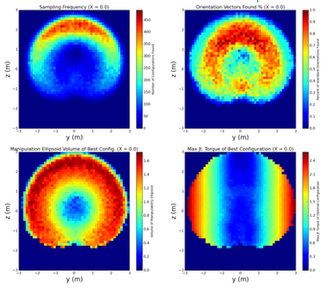
Visual representation of various performance metrics, including reachable workspace, manipulability, and maximum torque output.
Soft Continuum-Joint Quadruped RobotSoft robot locomotion is an active area of research. Soft, legged, mobile bases would allow soft manipulators to be able to move and operate in numerous environments including in homes, in offices, in disaster scenarios, in search and rescue operations, or on other worlds. Our lab is pushing the boundaries on both the control and the design of such robots. The Quadruped Leg Project aims to find an optimal design that will allow the quadruped to easily traverse rough terrain and carry necessary payloads. This task requires a balance between heavy load bearing capabilities, dexterous and precise movement, and the ability to step over or around obstacles while maintaining balance.
Our current design is constructed from pneumatically-actuated, continuum joints manufactured by Pneubotics, mounted on custom links that allow convenient restructuring of the leg's shape or length. After identifying metrics, an optimization using a genetic evolutionary algorithm found a spectrum of optimal designs that span the tradeoff between strong, load bearing legs and nimble, finely balanced legs. |
Simultaneous Structure - Actuator OptimizationAnother active project aims to find strategies for jointly optimizing kinematic design and actuator choice. Traditionally, optimization techniques for robots have been used to make fine adjustments of the lengths or orientations of structural members after the general structure of the robot arm (including the choice of motors or actuators) has been decided on by human designers. However, appropriate design metrics should make it possible to include more fundamental aspects of the robot design, such as the size and type of actuator, in the optimization.
Accomplishing this requires the development of both kino-dynamic metrics (performance metrics which consider both the kinematic structure of the robot and the dynamic characteristics) and tractable discrete optimization algorithms that can consider both continuous design variables like link length or angle, and discrete design variables like a choice between 3 viable electric motors. |
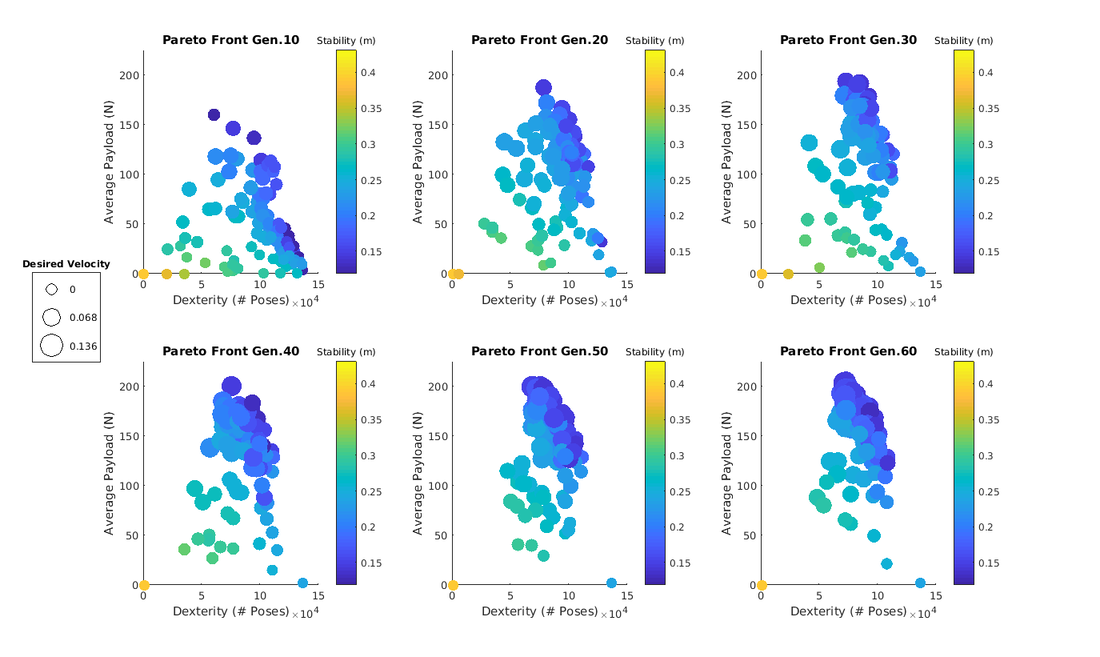
Multi-objective optimization produces a range of optimal designs known as a Pareto Front, which represents the trade-offs between different optimization objectives.
|




