Estimation and Control Algorithms that Exploit Soft Robots' Unique Capabilities
NSF Emerging Frontiers in Research and Innovation Grant (NSF EFRI)
NSF Emerging Frontiers in Research and Innovation Grant (NSF EFRI)
Adaptive Model Predictive Control (MPC)We present a form of adaptive model predictive control based on model reference adaptive control (MRAC). We show that like MRAC, model reference predictive adaptive control (MRPAC) is able to compensate for “parameter mismatch" such as unknown inertia values. Our experiments also show that like MPC, MRPAC is robust to “structure mismatch” such as unmodeled disturbance forces not represented in the form of the adaptive regressor model. Experiments in simulation and hardware show that MRPAC outperforms individual MPC and MRAC.
Hyatt P, Johnson CC and Killpack MD (2020) Model Reference Predictive Adaptive Control for Large-Scale Soft Robots. Front. Robot. AI 7:558027. doi: 10.3389/frobt.2020.558027 |
|
Combining Deep Learning and Physics Based modeling for mPC
|
We propose a hybrid modeling approach that combines machine learning methods with an existing first-principles model in order to improve overall performance for a sampling-based non-linear model predictive controller. We validate this approach on a soft robot platform and demonstrate that performance improves by 52% on average when employing the combined model.
Johnson CC, Quackenbush T, Sorensen T, Wingate D and Killpack MD (2021) Using First Principles for Deep Learning and Model-Based Control of Soft Robots. Front. Robot. AI 8:654398. doi: 10.3389/frobt.2021.654398 |
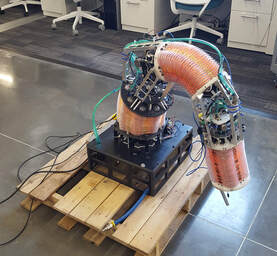
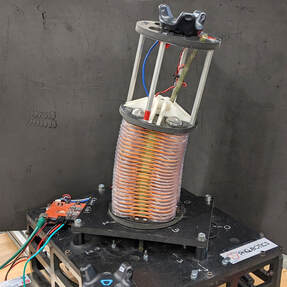
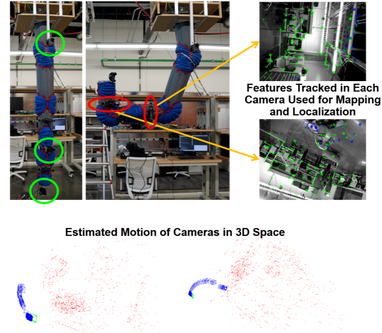
Body Mounted cameras for Soft Robot Joint Estimation and Control
|
We present a novel approach to accomplishing soft robot configuration estimation and control using RGB-D cameras and SLAM-based methods. By placing cameras on the unactuated sections of our large-scale (approximately 2 meters long) pneumatic soft robot, we can map an environment and then estimate the orientation of the robot links using landmark-based localization. Finally we show that this method of estimation is effective for closed-loop control of soft robots by controlling our large scale soft robot through a series of joint configurations.
Awaiting Publication : IROS 2021-IEEE Xplore |
|




