
|
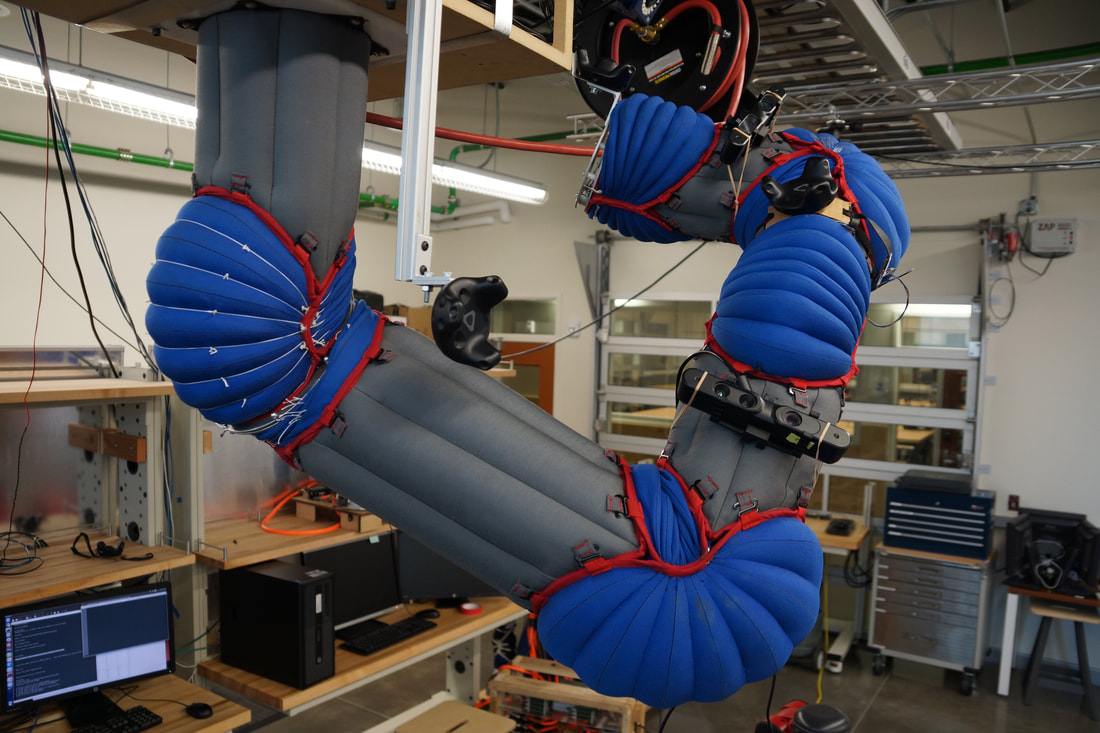
Model Predictive Control of Compliant RobotsWhile compliance can help robots be safer around humans and in modeled environments, it can make them underdamped and less able to perform useful tasks. By effectively modeling the compliant robots and using Model Predictive Control the robots can be controlled in away that they will no longer be underdamped while retaining their original compliance.
|

|
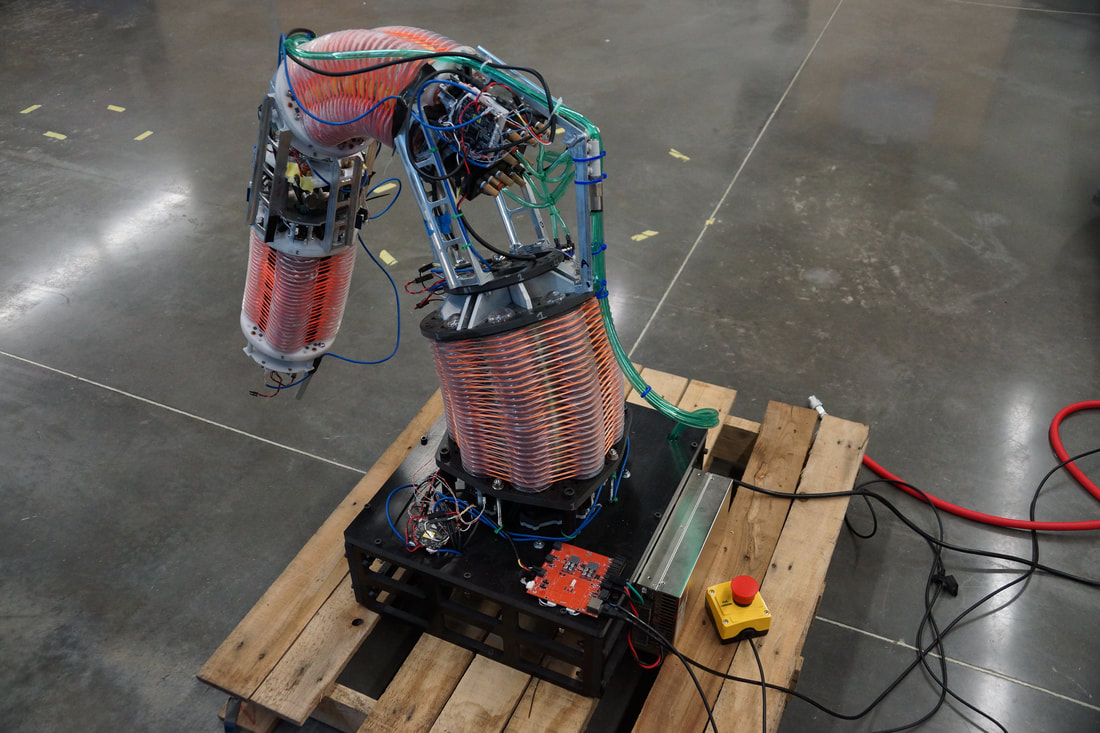
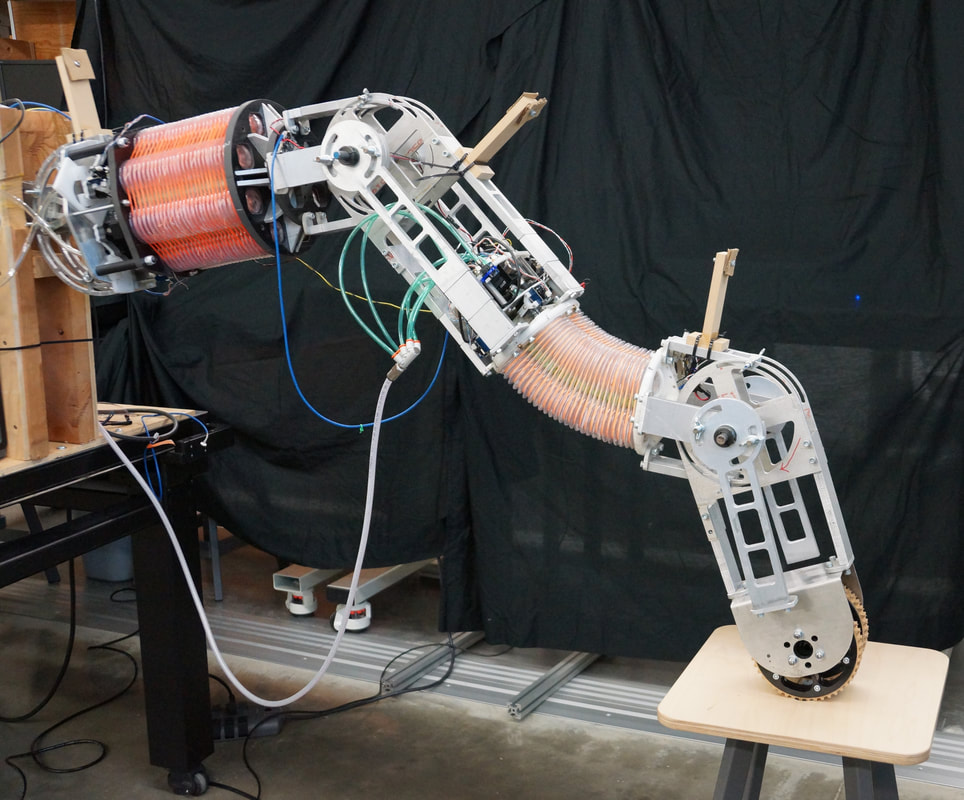
Dynamic Modeling of Pneumatic RobotsIn order to have good control, one must have quality models of the system. For this soft robot that include developing dynamic antagonistic pneumatic actuation models. Good models will let us take advantage of the soft, compliant characteristics of the robot to control contact forces and the compliance of the joint. Both of these features allow for safe human-robot and robot-environment applications.
|
|
Adaptive Control of Soft RobotsOver time the dynamic behavior of soft robots changes as wear and tear occurs. Adaptive control will help address this problem and will also serve to adapt the system model when perturbations occur or external interactions occur with the robot that would require the model to change in order for the robot to continue to operate accurately.
|
|
|
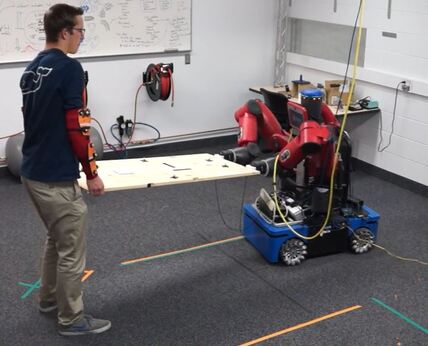
Physical Human Robot Interaction
Robots and humans one day will physically work together to complete tasks like moving or search and rescue. Our study of human-human teams has helped us understanding how people communicate with each other through the forces they exert on an object. Using what we have learned we have created novel control methods for planar co-manipulation of extended objects.
|
Tactile Sensor DevelopmentTactile sensing is one of the main ways humans determine how hard they should grip something or how hard they can push against something. Without some sort of tactile sensing, robots can't easily determine when there are obstacles in the way, or when they need to exert more or less force on an object. The purpose of this project is to develop a tactile sensor that can be used for force control on a pneumatically actuated robot.
|

|
|
Kinematic Parameter OptimizationModern optimization techniques are a great tool for designers, allowing them to offload the fine details of a design onto an optimization algorithm and focus instead on the tradeoffs and performance of possible designs. Using this tool requires the development of appropriate performance metrics that successfully distinguish between good and poor designs, and robust and computationally efficient optimization algorithms. If these challenges are overcome, we can use the optimization to automatically design robots for tasks and choose what design characteristics are most important for the task at hand.
|
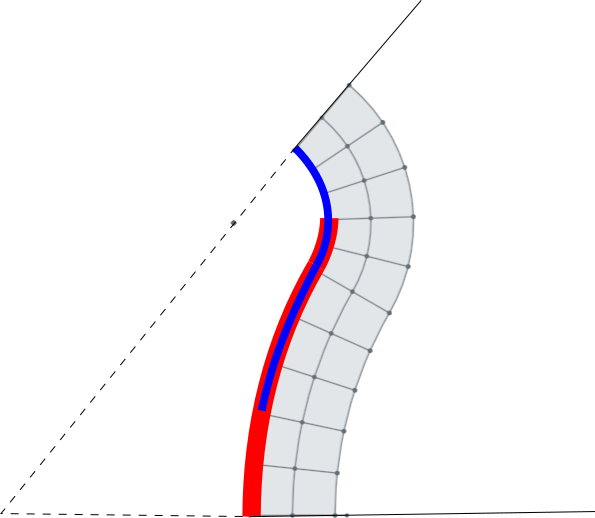
Shape Estimation of Soft RobotsTraditional rigid link manipulators have fixed kinematic relationships between their links, and their joints have fixed degrees of freedom. In a soft robot, these relationships aren't fixed, as any amount of deformation along the length of the robot causes error in fixed kinematic parameterizations. An important aspect then of being able to have soft robots interacting usefully with their environment then is accurate shape estimation. By cleverly placing sensors and using a few geometric assumptions, the robots shape can be estimated.
|
|




