|
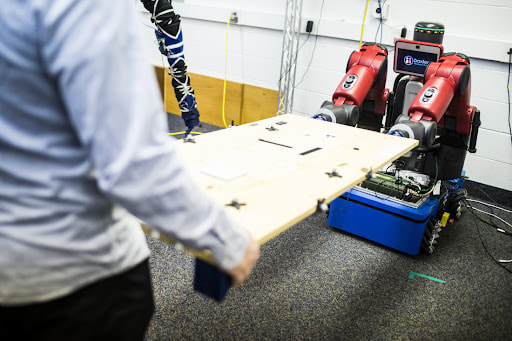
Robots and humans one day will physically work together to complete tasks. Our goal is that robots and humans will be able to manipulate and move objects as a team in an efficient and natural way with no communication other than the forces felt through the object. We have completed studies with pairs of humans to understand how people work together to move objects. By understanding how people communicate with each other through the forces they exert on an object they are co-manipulating, we have created novel control methods for planar co-manipulation of extended objects.
We are continuing research in this area to develop controllers that work in 6 DOF. We expect that these control methods will allow safe and intuitive co-manipulation between humans and soft robots. |

Skill OneSed ut perspiciatis unde omnis iste natus error sit voluptatem accusant doloremque laudantium, totam rem.
|

Skill TwoSed ut perspiciatis unde omnis iste natus error sit voluptatem accusant doloremque laudantium, totam rem.
|

Skill ThreeSed ut perspiciatis unde omnis iste natus error sit voluptatem accusant doloremque laudantium, totam rem.
|




