Shape Estimation of Soft Robots
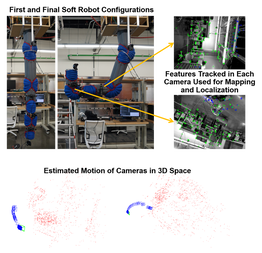
Because Soft Robots lack traditional joints, and they can deform continually along their length, shape estimation is a challenging task. One of the biggest questions is what kind of sensors do we need in order to accurately and completely describe their shape. Using RGB-D cameras we have shown that current SLAM methods allow for real-time configuration estimation and control of a soft robot with as much accuracy as our motion capture system.
Sorensen, C., Hyatt, P., Ricks, M., Nielsen, S., & Killpack, M. Soft Robot Configuration Estimation and Control Using Simultaneous Localization and Mapping
Sorensen, C., Hyatt, P., Ricks, M., Nielsen, S., & Killpack, M. Soft Robot Configuration Estimation and Control Using Simultaneous Localization and Mapping




